นาย ธีรภัทร บุญช่วย ท.ทีน
นาย ชนัตร กาญจนะเเก้ว เต้ย
นาย นนธวัช อินทรงค์ นนท์
นาวสาว รุสมี เขร็มกา มี่
นาย ภควัฒน์ ศรีสุวรรณ อาร์ม
นาย ณัฐรินทร์ ลือวิพันธ์ แทน
นาย อิทธิกร วิจารณบูรณ์ อาร์ท
นาย ปิยะณัฐ ช่วยมั่ง โดม
นาย วัสพล ศรีวรรณ ดิว
นางสาว สุนิษา ฟองมณี ปาล์ม
นาย วรโชติ โภชน์สารี คิม
นาย ณัฐวัฒน์ หนูประพันธ์ คอม
นาย พลธกร ปานจรูญ โน
นาย อิมรอม เบ็นหมัดหนิ รอน
นาย อนุชา สุภาพบุรุษ ก๊อต
นาย ภูริทัติ ศรีสวัสดิ์ ภูภู่
นาย วีรวัฒน์ เสาวคนธ์ แม็ค
นาย ศราวุธ บูหมิ ฟิก
นาย พงศ์ศิริ ปิ่นพงค์ เต้ย
นาย สถาพร ดำคง หนึ่ง

สถานการณ์ปัจจุบันกับการเปลี่ยนแปลง
ในปัจจุบันระบบการผลิตแบบอัตโนมัติได้มีการพัฒนาเพิ่มประสิทธิภาพ
และมีราคาที่ผู้ประกอบการผลิตอุตสาหกรรม ขนาดกลางและเล็กสามารถเข้าถึงและใช้งานได้
และมีโซลูชั่นมากมายหลายรูปแบบ แต่การเลือกระบบอัตโนมัติ
มิได้พิจารณาเฉพาะด้านต้นทุน คุณภาพ และความสามารถในการผลิต
ยังมีปัจจัยเรื่องความยากง่ายในการใช้งาน การอัพเกรด การซ่อมบำรุง การใช้พลังงาน
ตัวบุคลากรผู้ใช้งาน ทำให้ผู้ใช้งาน เกิดความยากในการตัดสินใจเลือกใช้งาน
และกังวลต่อประสิทธิภาพ หรืออาจมองไม่ครอบคลุม
การพิจารณาที่ราคาต่ำอย่างเดียวจึงกลายเป็นอุปสรรคในการแข่งขันเพราะระบบที่เลือกไม่เหมาะสม

นอกจากเทคโนโลยีอัตโนมัติแล้ว
หุ่นยนต์อุตสาหกรรมถือเป็นส่วนหนึ่งของการใช้ระบบอัตโนมัติเพื่อการผลิต
และเป็นหนึ่งในวิธีการเพิ่มความสามารถในการผลิต
ซึ่งปัจจุบันผู้ประกอบการผลิตในภาคอุตสาหกรรมให้ความสนใจในการปรับเปลี่ยนระบบอัตโนมัติเดิมมาเป็นการใช้หุ่นยนต์อุตสาหกรรมเป็นหนึ่งในสายการผลิต
ซึ่งจากการคาดการณ์ ของ IFR (International Federation of Robotics) ยอดขายหุ่นยนต์ทั่วโลกจะเพิ่มขึ้น
6% โดยเฉลี่ยต่อปี จาก ปี พ.ศ.2557 ถึง ปี พ.ศ. 2559 และในปีต่อๆ ไปอย่างต่อเนื่อง
และนั่นหมายความว่าหุ่นยนต์อุตสาหกรรมจะเริ่มเข้ามามีบทบาทเป็นอย่างมากในกระบวนการผลิต
เราในฐานะแรงงานที่ต้องรับผลกระทบโดยตรงจึงต้องมีการปรับเปลี่ยนวิธีการให้สอดคล้องกับการเปลี่ยนแปลงที่จะเกิดขึ้นในอนาคตด้วย
และเพื่อเป็นการเตรียมความพร้อมต่อการเปลี่ยนแปลงที่จะเกิดขึ้น
ผู้เขียนจึงขอนำเสนอข้อมูลความรู้ขึ้นพื้นฐานเกี่ยวกับหุนยนต์ในงานอุตหุ่นยนต์ในงานอุตสาหกรรม
เป็นเครื่องจักรกลอัตโนมัติอีกรูปแบบหนึ่งที่ถูกออกแบบและสร้างมาเพื่อนำมาใช้ทดแทนคนในกระบวนการผลิตต่างๆ
หรือนำมาใช้เพื่อช่วยในกระบวนการผลิตในลักษณะหุ่นยนต์ทำงานร่วมกับคน
ซึ่งหุ่นยนต์ที่ถูกสร้างมานั้นมีหลากหลายชนิดขึ้นอยู่กับลักษณะของงานที่ต้องการนำมาประยุกต์ใช้งาน
สำหรับหุ่นยนต์ในงานอุตสาหกรรมนั้นสามารถแบ่งออกได้ ตามลักษณะการทำงาน ได้ 7 ชนิด
ดังนี้
Cartesian
Robot
Cylindrical
Robot
Polar
Coordinate Robot
Scalar Robot
Articulate
Robot
Spine Robot
Parallel
link Robot
หุ่นยนต์อุตสาหกรรม
ทั้ง 7 ชนิดที่กล่าวมาข้างต้นนั้น
จะมีความแตกต่างกันตรงลักษณะการเคลื่อนที่และความสามารถในการทำงานที่ไม่เหมือนกัน
รวมไปถึงการประยุกต์ใช้งานที่ต่างกันด้วยแต่ทั้งหมดถูกสร้างขึ้นมาด้วยหลักการพื้นฐานเดียวกัน
ในที่นี้ผู้เขียนจะขอกล่าวถึงเฉพาะส่วนของหุ่นยนต์ที่ถูกนำมาประยุกต์ใช้งานในภาคอุตสาหกรรมมากที่สุด
นั่นคือ Articulate Robot
อันเนื่องมาจากหุ่นยนต์ชนิดนี้มีความสามารถในการทำงานและสามารถนำมาประยุกต์ใช้ในงานอุตสาหกรรมได้หลากหลายรูปแบบมากกว่าขนิดอื่นๆ
นั่นเอง
Articulate
Robot เป็นหุ่นยนต์ที่ออกแบบมาให้มีลักษณะคล้ายคลึงกับแขนของมนุษย์ตั้งแต่ช่วงหัวไหล่ไหลลงไป
นั้นหมายความว่าหุ่นยนต์ชนิดนี้
จะมีความสามารถในการทำงานและความสามารถในการเคลื่อนที่ได้ในลักษณะที่คล้ายกับการเคลื่อนที่ของแขนมนุษย์นั่นเอง
หลายๆ คนจึงมักเรียกหุ่นยนต์ชนิดนี้ว่า ‘แขนกล’สาหกรมเพื่อให้ทุกท่านได้เข้าใจและสามารถประยุกต์ใช้งานได้อย่างมีประสิทธิภาพ

จากรูปที่ 1 ที่แสดงด้านบนนั้นเป็นลักษณะของ Articulate
Robot หรือที่เรียกกันว่า แขนกล
จะเห็นได้ว่ามีโครงสร้างที่คล้ายคลึงกับของของมนุษย์
ซึ่งนั่นหมายความว่าหุ่นยนต์ชนิดนี้ถูกออกแบบมาเพื่อใช้ในการหยิบจับชิ้นงานในกระบวนการผลิต
แต่ในปัจจุบันนี้หุ่นยนต์ชนิดนี้ถูกนำมาประยุกต์ใช้งานให้มีความสามารถมากกว่าทำงานใช้หยิบจับชิ้นงาน
ไม่ว่าจะเป็นการประยุกต์ใช้ในกระบวนการงานเชื่อมโลหะต่างๆ งานพ่นสี หรืองาน Spot Gun และบางองค์กรยังมีการพัฒนาให้หุ่นยนต์ชนิดนี้สามารถทำงานในกระบวน
Machining อีกด้วย จากตัวอย่างการประยุกต์ใช้งานข้างต้น
จะเห็นได้ว่าหุ่นยนต์จะถูกนำมาใช้งานทดคนนั่นเป็นเรื่องจริงเลยทีเดียว
ข้อดีของการใช้หุ่นยนต์เพื่อนำมาทำงานทดแทนคนก็เพราะหุ่นยนต์มีสิ่งที่ไม่เหมือนคน
ดังนี้
-หุ่นยนต์มีความแม่นยำและความเที่ยงตรงในการทำงาน
-หุ่นยนต์มีความสามารถในการทำงานในกระบวนซ้ำๆ
ได้ดีกว่า
-หุ่นยนต์สามารถปรับเปลี่ยนรูปแบบกระบวนการทำงานได้หลากหลาย
-หุ่นยนต์สามารถประยุกต์ใช้งานได้ในหลากหลายสภาพแวดล้อม

จากเหตุผลที่กล่าวมาข้างต้นล้วนเป็นข้อดีของหุ่นยนต์ที่จะถูกนำมาใช้งานทดแทนคน
แต่ก็ไม่ได้หมายความว่ามันจะดีไม่กว่าคนเสียทั้งหมด แน่นอนว่าหุ่นยนต์ก็คือเหล็กที่ถูกนำมาประกอบเข้าด้วยกันและใส่กลไกต่างๆ
ให้สามารถเคลื่อนที่ได้ อีกทั้ง ยังต้องมีระบบในการควบคุบการทำงาน ดังนั้น
การที่หุ่นยนต์จะทำงานหรือเคลื่อนที่ได้จะต้องอาศัยทักษะและความรู้จากคนอยู่ดี
ทั้งนี้ เพื่อทำหน้าที่ในการป้อนโปรแกรมคำสั่งต่างๆ เพื่อให้หุ่นยนต์สามารถทำงานได้ตามที่มนุษย์ต้องการ
เราจึงต้องมีการเตรียมพร้อมเพื่อให้ทันต่อการเปลี่ยนแปลงที่จะเกิดขึ้น
องค์ประกอบของระบบควบคุมหุ่นยนต์
ในตอนแรกนี้ผู้เขียนขอทิ้งท้าย
ให้ทุกท่านทราบเกี่ยวกับองค์ประกอบของระบบควบคุมหุ่นยนต์กันไว้เพื่อที่จะได้เตรียมความพร้อมในเรื่องต่อไปในตอนหน้า
สำหรับองค์ประกอบของระบบในการควบคุมหุ่นยนต์ประกอบด้วย องค์ประกอบหลัก คือ
Programming Pendent : อุปกรณ์ที่ทำหน้าที่ในการป้อนคำสั่งโดยผู้ควบคุมหรือ
User
Controller : ส่วนที่ทำหน้าที่ในการรับคำสั่งจาก User ผ่าน
Programming Pendant และนำมาประมาณผล
เพื่อทำการควบคุมหรือสั่งการทำงานของหุ่นยนต์
Manipulator : เรียกง่ายๆ ว่า ตัวหุ่นยนต์
ที่จะทำงานตามคำสั่งที่ผ่านการประมวลผลจาก Controller
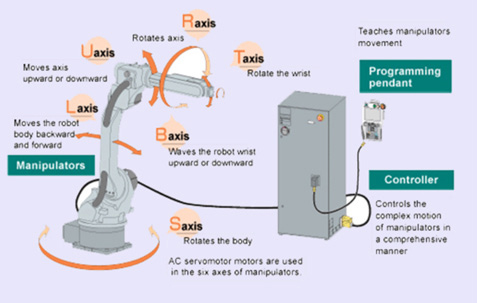
รูปที่
2 : องค์ประกอบของระบบควบคุมหุ่นยนต์
จากรูปที่ 2 ที่แสดงด้านบนนั้นเป็นองค์ประกอบของระบบควบคุมหุ่นยนต์
ซึ่งจะมีอยู่ด้วยกัน 3 ส่วนหลัก และจะเห็นได้ว่าองค์ประกอบทั้ง 3 นั้น
จะมีความสัมพันธ์กันในกระบวนการควบคุมซึ่งในแต่ละส่วนนั้นก็มีรายละเอียดที่สลับซับซ้อนอยู่มากทีเดียวและนี่จึงเป็นเหตุผลที่เราต้องทำความรู้จักกับมันให้มากเพื่อที่จะได้สามารถทำงานร่วมกับมันได้
ประเภทของหุ่นยนต์อุตสาหกรรมในปัจจุบัน

ประเภทของหุ่นยนต์อุตสาหกรรมในปัจจุบันหุ่นยนต์อุตสาหกรรมในปัจจุบันมีมากมายหลากหลายรูปแบบ
มีการใช้งานและจุดเด่นที่แตกต่างกัน Modern Manufacturing ขอนำเสนอรูปแบบหุ่นยนต์ที่สามารถเจอได้ในอุตสากรรมการผลิตในยุคปัจจุบัน
หุ่นยนต์อุตสาหกรรม
ตามความหมายของ ISO 8373:2012: หมายถึง การควบคุมอัตโนมัติ
ความสามารถในการถูกตั้งโปรแกรมหรือการตั้งค่าการทำงานได้อย่างหลากหลายด้วยระบบตั้งแต่
3 แกนขึ้นไป
สามารถเป็นได้ทั้งรูปแบบติดตั้งและรูปแบบที่สามารถเคลื่อน
Linear Robot คือ
หุ่นยนต์ที่ทำงานบนแกนตั้งฉากซึ่งหมายรวมถึงหุ่นยนต์แบบ Cartesian และ
Gantry เอาไว้ด้วยกัน โดยสามารถทำงานได้บน 3 แกน X Y และ
Z ด้วยการเคลื่อนที่แนวตรงทำให้การทำงานมีความแม่นยำสูงและออกแบบการทำงานได้ง่าย
มีความแข็งแกร่งทนทานเนื่องจากมีระยะการใช้งานที่แน่นอน
นิยมใช้ในการหยิบจับเพื่อทำการประกอบ เช่น การประกอบชิ้นส่วนอิเล็กทรอนิกส์
หรือติดชิ้นส่วนยานยนต์ด้วยสารเคมี



